_KI.EXHIBITION



ki[き]
ki[き]

ki[き]
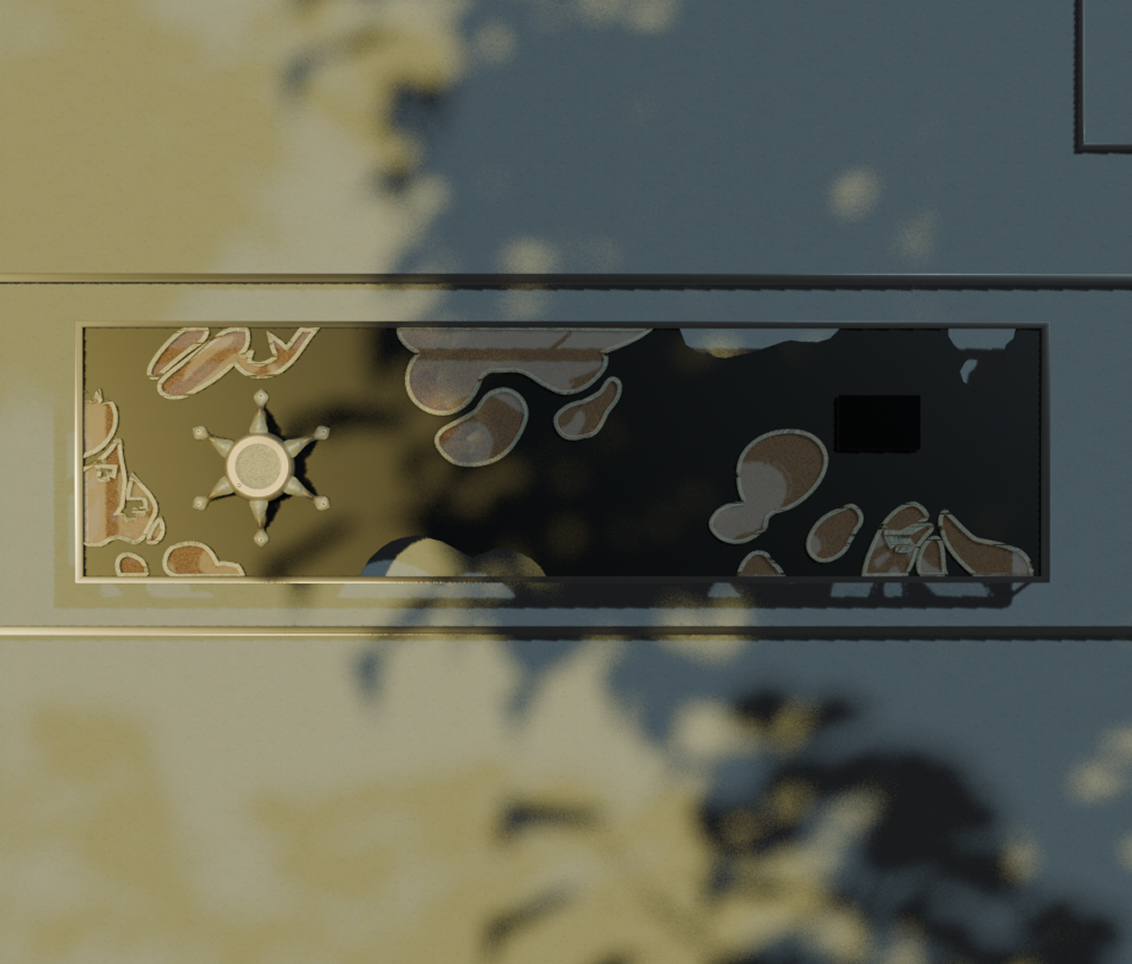
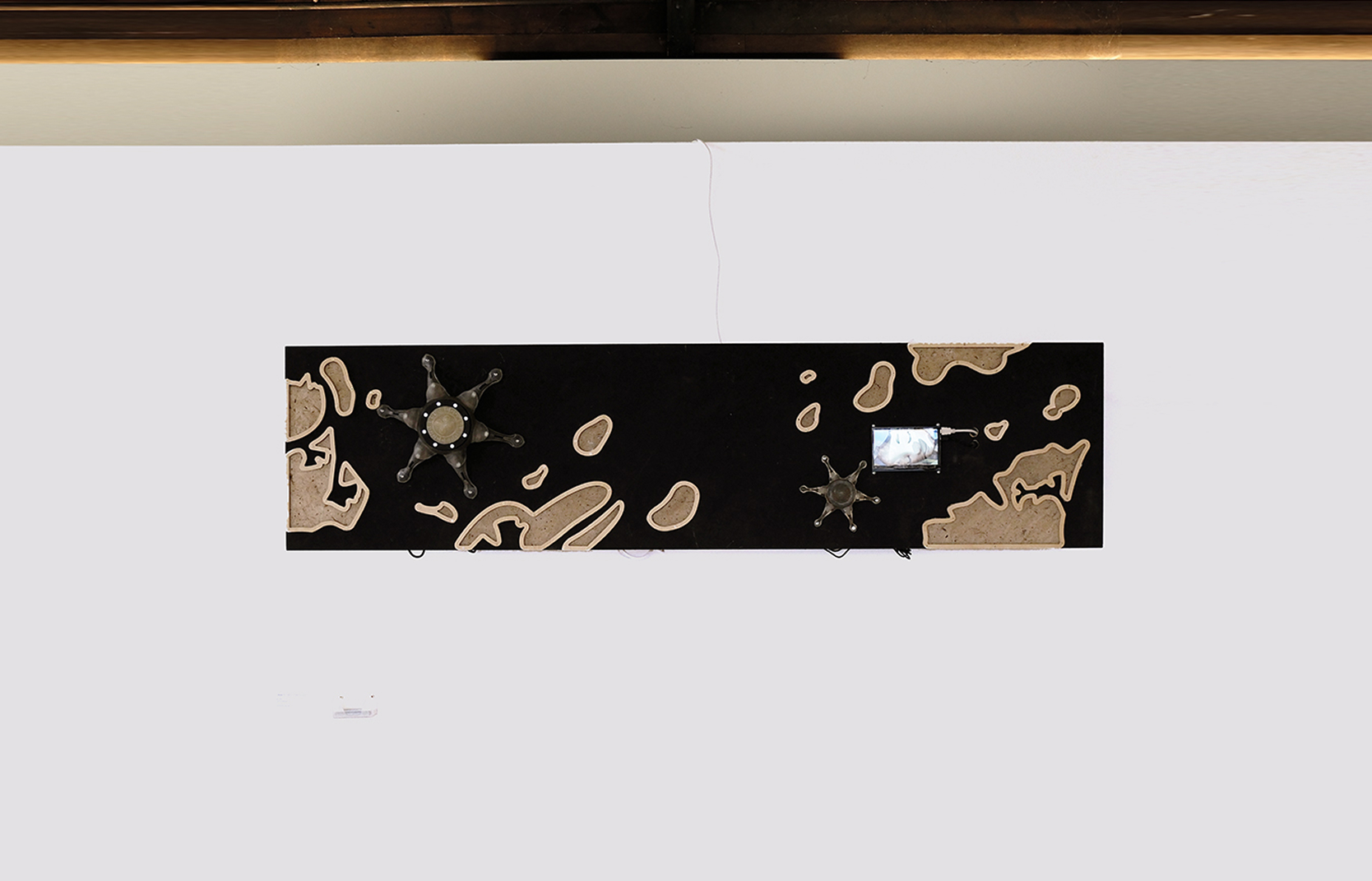
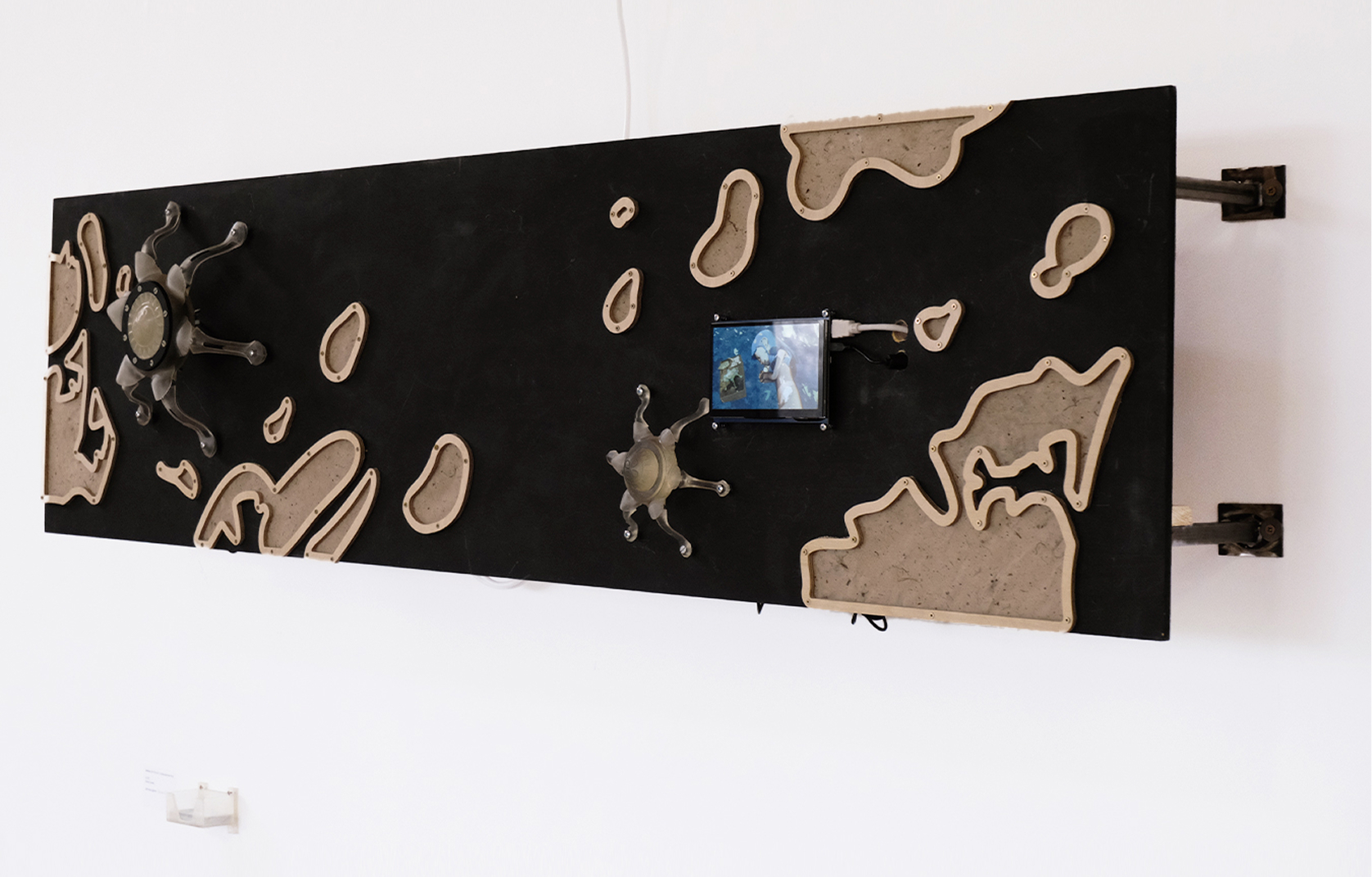
ki [き] (translated to ‘tree’) is intended as a robotic ‘painting’ that captures tree shadows enclosing its inhabitant of an air-actuated robot. The use of washi paper behaves as light windows, allowing light to pass and create shadows on the immediate wall. It is directly inspired by the phenomenon of komorebi (木漏れ日), the Japanese’s term to describe the ‘bleeding lights of tree’. Beyond describing a natural effect, it points towards a cultural and historical sensitivity towards shadows being dominant to the direct portrayal of light, both in art practice and in ways of living. In my seven years studying Japanese and then living in Tokyo, I have observed such sensitivity in ways of living, instanced by a subconscious preference for dulled instead of shiny materials, and dimmed over strong bright lighting within interior spaces. As ki [き] intends to portray, beauty can lie in silent places where one dominant culture does not instruct the eye and mind to look. The piece thus silently opposes cultural frames limited by Eurocentric art history.
ki [き] also inspires a conflicted creative process that negotiates the relationship between technology and tradition. Paintings are traditionally flat and rather lightweight. This allows them to be transported and hung by collectors easily, thereby evolving into a standard category of art medium. In the case of ki [き], such conditions are inappropriate to its description. The use of electronic and computational parts, alongside steel brackets that protrude the piece from the wall, de-flattens the piece and makes it heavy thus difficult to transport. Additionally, inspired by my upbringing in cities and contemporary experience of living through ‘scientific progress’, the amoeba robot embodies outdated technologies that have become naturally useless in the process. In this piece, the robot does nothing but breathes in and out. I hope this uselessness allows viewers to reflect on how ‘progress’ erases and deletes beautiful things, and identities that my generation could have become.
Ki prototype
Ki prototype
Ki prototype
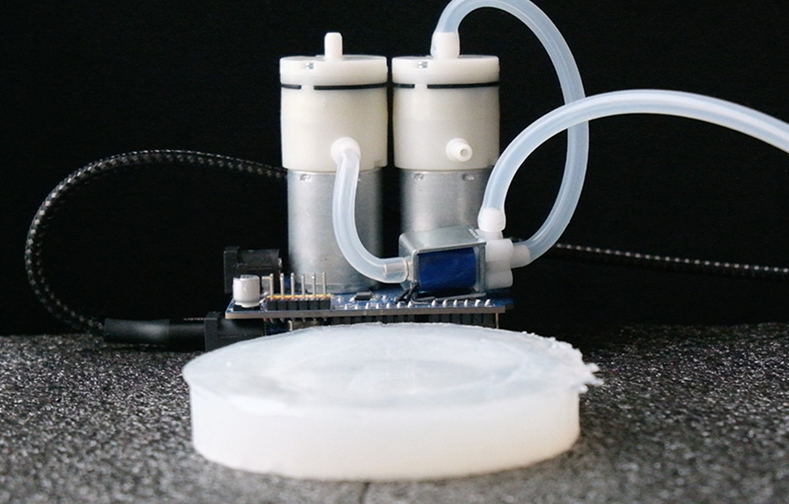
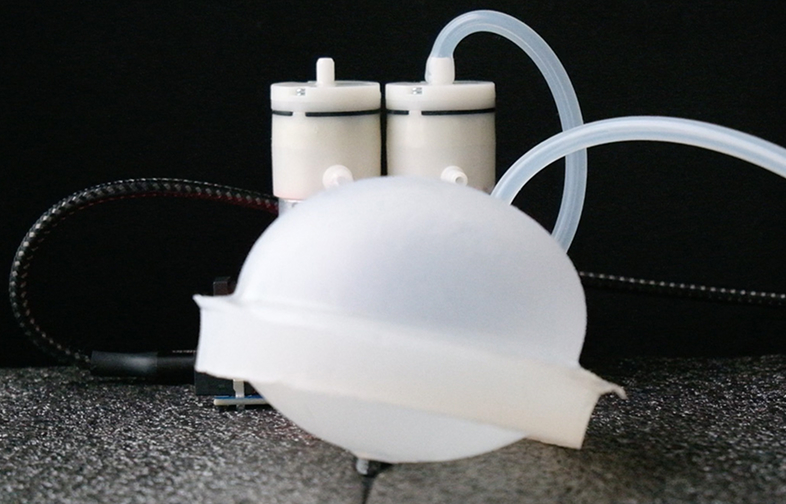
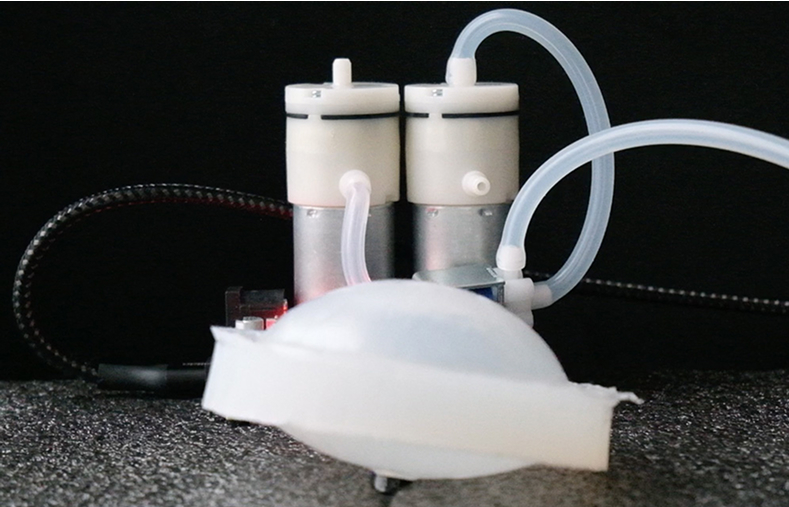
At the center of the installation is an air-actuated soft robotic form that expands and contracts in a slow, rhythmic cycle, mimicking the motion of breathing. This movement is created using a small air-pump system connected to internal air chambers inside the soft body. The pump gently pushes air in, inflating the form, then releases it, allowing the material to deflate under its own elasticity. The motion is intentionally subtle but is soon realised by the audience through the mechanism’s roaring. The “breathing” does not serve a functional purpose; it is not interactive, productive, or efficient.
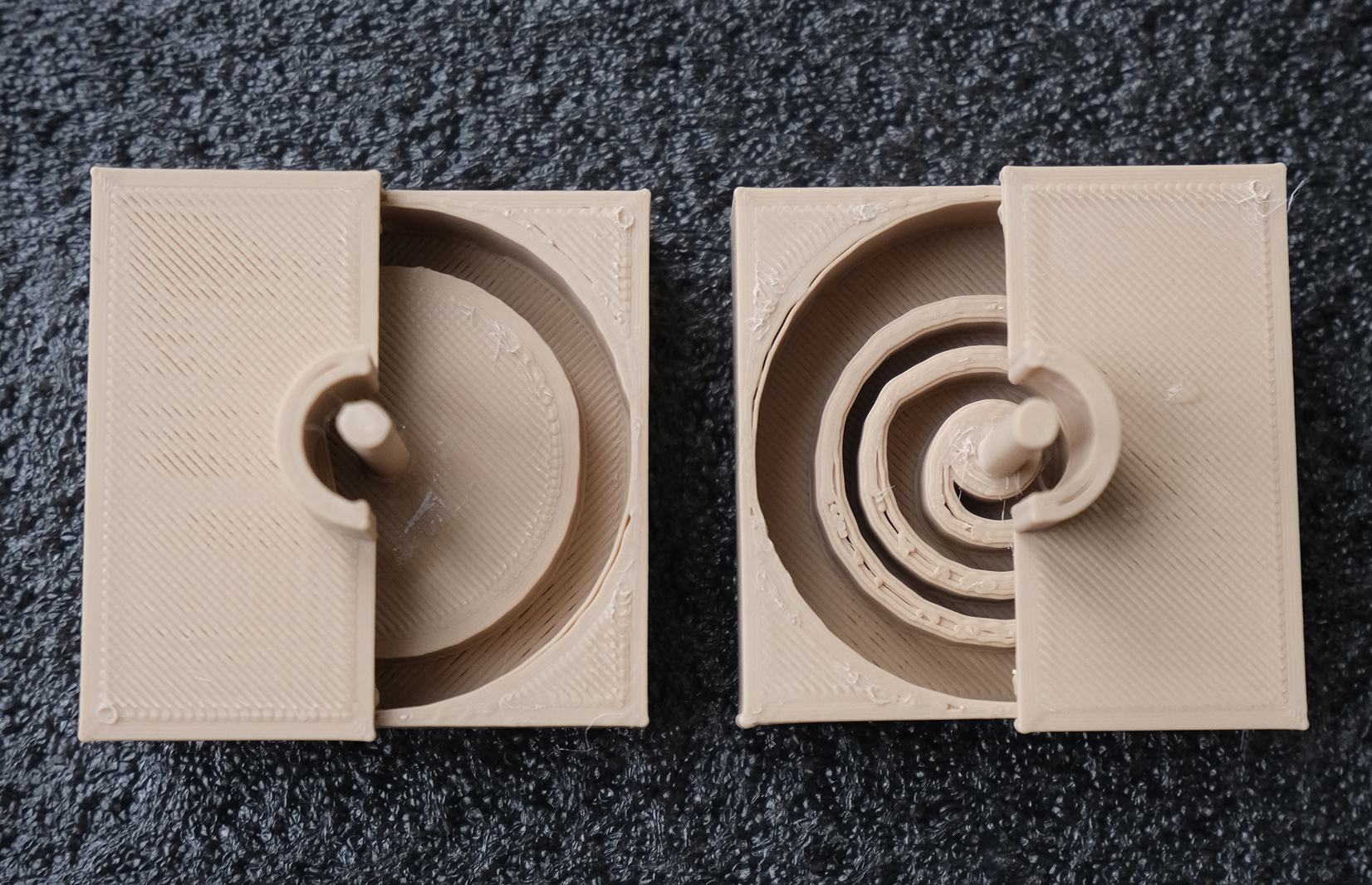
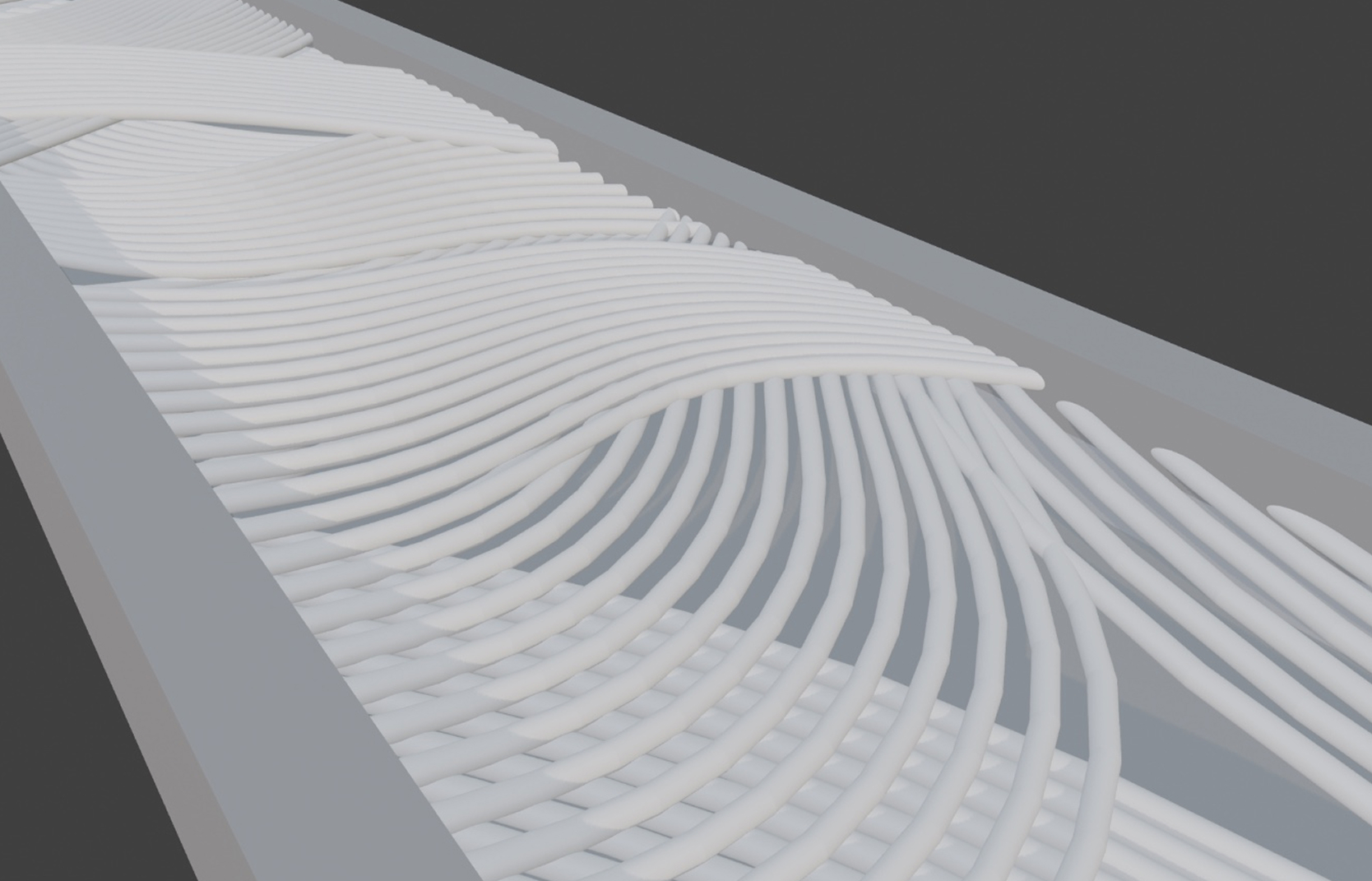
The fabrication process centred on developing a pneumatically actuated soft mechanism using cast silicone. I first designed and 3D printed moulds in PLA to define both the external form and the internal air cavities. Multiple cavity geometries were prototyped to test how chamber volume, wall thickness, and air pathways influenced deformation behaviour when pressurised by the air-pump system. These variations produced different expansion patterns and movement rhythms under inflation and deflation cycles. A 30A Shore hardness silicone was selected after material testing, as it provided an effective balance between elasticity and structural integrity. This ensured sufficient flexibility for visible pneumatic actuation while maintaining durability and resistance to fatigue over extended exhibition periods.
Ki prototype

Ki prototype
ki[き] Initial imaging

ki[き] Initial imaging
Highlight: [[_Art Project 002]]